拖动电机
直流电机
直流电动机的基本组成
直流电机
- 定子
- 机座
- 主磁极
- 主极铁芯
- 励磁绕组
- 换向器
- 电刷
- 端盖
- 转子
- 电枢铁芯
- 电枢绕组
- 换向器
- 转轴
- 轴承
- 风扇
感应电动势与电磁转矩
感应电动势
$E_a = C_e\Phi n$
其中,电动势常数 $C_e = \frac{pN}{60a}$
$p$ : 磁极对数
$N$ : 电枢绕组的总导体数
$a$ : 并联支路对数
$\Phi$ :每极磁通
$n$ :转速 (r / min)
电磁转矩
$T = C_T \Phi I_a$
其中,转矩常数 $C_T = \frac{pN}{2\pi a}$
转矩常数与电动势常数的关系式
$C_T = 9.55C_e$
直流电机特性的基本关系式
| 电动机 | 发电机 | |
|---|---|---|
| 电枢回路电压 | $U_a = E_a +I_aR_a$ | $E_a = U_a + I_aR_a$ |
| 机电能量转换 | $E_a = C_e\Phi _n$ $T = C_T\Phi I_a$ |
$E_a = C_e\Phi _n$ $T = C_T\Phi I_a$ |
| 机械系统转矩 | $T=T_L=T_0+T_2$ | $T_1=T+T_0$ |
| 励磁和主磁通 | $I_f = U_f / R_f$ $\Phi = f(I_f,I_n)$ |
$I_f = U_f / R_f$ $\Phi = f(I_f,I_n)$ |
| 功率平衡 | $P_1 = P_M + p_{Cua}$ $P_M = P_0+P_2$ |
$P_1 = P_M + P_0 = P_2 + \Sigma P$ $\Sigma P = p_{Cua} + P_m + p_{Fe}$ |
其中,
- $U_a$ : 电枢两端的端电压
$E_a$ : 电枢感应电动势
$I_a$ : 电枢电流
$T$ : 电磁转矩
$T_L$ : 负载转矩
$T_0$ : 空载转矩
$T_1$ : 原动机拖动发电动机的拖动转矩
$T_2$ : 电动机的输出转矩
$n$ : 电动机的转速
$U_f$ : 励磁电压
$I_f$ : 励磁电流
$\Phi$ : 主磁通
$\Omega$ : 机械角速度 $\Omega = \frac{2\pi n}{60}$
对于电动机:
- $P_1$ : 电动机从电源输入的电功率, $P = UI_a$
$P_M$ : 电磁功率, $P_M = T\Omega = E_a I_a$
$p_{Cua}$ : 电枢回路总的铜损耗
$p_0$ : 空载损耗,包括铁损耗$p_{Fe}$和机械摩擦损耗$p_m$, $p_m = p_0 + P_2$
$P_2$ :转轴上输出的机械功率,$P_2 = T_2 \Omega$
总结
- 对于电动机
输入功率经过铜损耗($P = I^2R$)剩下的为电磁功率
电磁功率经过空载损耗 剩下来的是输出功率
例题
已知一台他励直流电动机的数据为$P_N = 75kW,U_N=220V,I_{aN}=383A,n_N=1500rpm,R_a=0.0192\Omega$,忽略磁路饱和的影响。
求:额定运行时的电磁转矩、输出转矩、输入功率和效率
- 求出感应电动势和电磁功率
- 有电磁转矩$T = C_T\Phi I_a$
$I_a = \frac{P_M}{C_e\Phi n}$
得 $T = 9.55\frac{P_M}{n}$ - 输出转矩$T = 9.55\frac{P_N}{n}$
直流电机的部分特性
串励直流电动机
对于串励直流电动机,励磁电流与电枢电流相同
有转速 $n = \frac{E_a}{C_e \Phi} = \frac{U – I_a R_a}{C_e \Phi}$
如果磁路没有饱和,速度会变快,可能飞车。
所以,串励电动机不允许在负载低于额定的 15% 下运行
他励直流电动机的机械特性
机械特性表达式:
$n = \frac{E_a}{C_e\Phi} = \frac{U – I_a R_a}{C_e\Phi} = \frac{U}{C_e \Phi} – \frac{R_a}{C_e C_T \Phi ^2} T$
改写成
$n = n_0 – \beta T = n_0 – \Delta n$
式中,
$n_0$ 为 $T = 0$时的转速,称为理想空载转速,$n_0 = \frac{U}{C_e\Phi}$
$\beta$ 为 机械特性的斜率, $\beta = \frac{R_a}{C_e C_T \Phi ^2}$
$\Delta n$ 为转速降,$\Delta n = \beta T$
可以做出一个曲线,称为固有机械特性曲线,存在以下特点:
1. 随着电磁转矩增大,转速降低
2. 硬特性
关于硬特性与软特性
机械特性的斜率越大,机械特性越软
对于他励电动机,机械特性通常偏硬
人为机械特性
他励直流电动机的电压、磁通、电枢回路电阻人为地改变后,其对应的机械特性称为人为机械特性
主要有三种:
1. 电枢回路串电阻
2. 改变电枢电压
3. 减弱磁通
例题
一台他励直流电动机的额定功率 $P_N = 75\mathrm{kW}$ ,额定电压 $ U_N = 220\mathrm{V}$ ,额定电流 $I_N = 385\mathrm{A}$ ,额定转速 $n_N = 1000\mathrm{r/min}$ ,电枢回路总电阻 $R_a = 0.01824\Omega$ ,电动机带额定恒转矩负载运行。若要求转速调到 $400\mathrm{r/min}$ ,假定 $T_0$ 不变。求:
(1)采用电枢串电阻调速时,电枢回路需串入多大的电阻?该转速下电动机的效率是多少?
(2)采用改变电枢电源电压调速时,电源电压应调到多少伏?电动机的效率是多少?
对于问题一
1. 先求出要求转速下的感应电动势
公式$E = C_e\Phi n$,需要知道$C_e\Phi$
通过已知条件求出来
$U_N – I_NR = C_e\Phi n_N$
得$C_e\Phi = 0.213$
求得 400rpm下感应电动势为 85.2V
2. 串入电阻加上原来的电阻应该分走$(220 – 85.2)V$,容易计算
3. 输出功率还有一个空载损耗,算出空载损耗
额定转速下 电磁功率减去输出功率就是空载损耗
空载损耗满足 $p = T\Omega$
所以可以算出400rpm下空载损耗
然后计算效率
对于问题二
1. 算出理想空载转速
$n = \frac{U_N}{C_e\Phi}$
得出$\Delta n$
2. 得出空载电压
3. 得出输入功率和输出功率
4. 计算效率
他励直流电动机的制动
- 能耗制动
电源断开,串入电阻 - 反接制动
电源反向,串入限流电阻 - 倒拉反转制动
电源正向,串入电阻
负载拖动电机旋转,使得电机超过空转转速。电机提供制动力
动能 >> 热能 - 回馈制动
动能 >> 电能
例题
他励直流电动机的额定功率$P_N = 75kW$,额定电压$U_N = 220V$,额定转速$n_N = 1000r/min$,额定电流$I_n=385A$, 电枢回路总电阻$R_a = 0.018242\Omega$,电动机拖动位能性负载$T_L=0.8T_N$运行。若要求电机一转速$250rpm$下放负载,求:
采用能耗制动运行时,电枢回路应该串入多大的电阻?该电阻上损耗的功率有多大?
采用倒拉反转运行时,电枢回路应该串入多大的电阻?该电阻上损耗的功率是多少?
采用改变电枢电源电压的反向回馈制动运行时,电枢回路不串电阻,反向电枢电源电压应该调到多少$V$?若反向电枢电源电压调到额定电压,下放速度变为多少?
- 对于题一和题二,关键地方在于求出感应电动势和回路电流。
通过题给条件求得$C_e\Phi$
容易求得$E_a = C_e\Phi n$
因为$T_L = 0.8T_N$,容易求得电流 - 对于题三,需要求出给定转速下损耗部分的转速
理想状态的空转转速为$n = \frac{U}{C_e\Phi}$
现实情况的转速为$n=\frac{U – IR}{C_e\Phi}$
进而求得给定转速下生成的电压,或者给定电压下的转速
章节问答题
换向器在直流发电机和直流电动机中起什么作用
整流(发电机)
逆变(电动机)
为什么直流电机的转子铁芯要用表面有绝缘层的硅钢片叠压而成
减少涡流损耗
硅钢片本身电阻率较高,叠加并绝缘更加减少涡流通路,减少铁损发热
主磁极和电枢铁芯都是电机磁路的组成部分,但其冲片材料为什么一个用薄钢板,一个用硅钢片
主磁极铁芯通过的是恒定方向的主磁通,不产生涡流损耗,可以降低成本
电枢铁芯旋转时,其内部磁场交变,会产生巨大的涡流损耗,必须使用硅钢片叠压减少涡流损耗
什么是直流电机的电枢反应?其结果是什么?
定义:电枢磁场对主磁场的影响和作用
结果:
- 磁场畸变(物理中性线偏移): 使气隙磁场发生扭曲,原来的几何中性线不再是的磁感应强度为零的位置,物理中性线逆转向(发电机)或顺转向(电动机)偏移。这会给换向带来困难,易产生火花。
- 去磁效应: 电枢磁动势的交轴分量使主磁场一半增强、一半削弱,但由于磁路饱和,增强的部分少于削弱的部分,导致每极下的合成磁通量略有减少。
简述直流电动机的工作原理。
基于“载流导体在磁场中受力”的电磁力定律。
- 将直流电源接在两电刷之间,电流由正刷流入,经电枢绕组后从负刷流出。
-
在N极下的导体电流方向为一个方向,在S极下的导体电流方向为另一个方向。
-
所有导体均受到方向相同的电磁力,形成驱动转子旋转的电磁转矩。
-
换向器的作用是确保导体从一个磁极下转到另一个磁极下时,其电流方向能及时改变,从而保证电磁转矩的方向始终一致,电机持续旋转。
主磁通既连着电枢绕组又连着励磁绕组,为什么只在电枢绕组里产生感应电动势?
励磁绕组静止,并且主磁通恒定
不具备产生电动势的必要条件
一台他励直流电动机,如果励磁电流和被拖动的负载转矩不变,而仅仅提高电枢端电压,试问电枢电流、转速变化如何?
负载转矩不变 >> 电磁转矩不变
电磁转矩不变 >> $T$ 不变 >> $T = C_T\Phi I$ >> 电枢电流不变
提高电枢电压 >> $U – IR = C_e\Phi n$ >> 转速上升
如何判别直流电机运行于发电机状态还是电动机状态?它们的$T,n,E_a,U_a,I_a$的方向有何不同?能量转换关系如何?
| 物理量 | 电动机状态 | 发电机状态 |
|---|---|---|
| 电动势$E_a$ | $E_a<U_a$ | $E_a >U_a$ |
| 电枢电流$I_a$ | 与电源电压$U_a$同向 | 与电源电压$U_a$反向 |
| 电磁转矩$T$ | 与转速同向 | 与转速反向 |
| 能量转换 | 电能 >> 机械能 | 机械能 >> 电能 |
为什么直流电动机直接起动时起动电流很大?
启动时候转速为0
根据公式 $U = E_a + I_aR_a$,启动电流$I = U / R$
因为电枢电阻很小,所以启动电流相当大
他励直流电动机起动过程中有哪些要求?如何实现?
要求:
- 起动转矩足够大,以克服静摩擦。
-
起动电流不能过大,以免烧坏电枢绕组和冲击电网。
实现方法:电枢回路串电阻起动 或 降压起动。核心都是在起动时降低电枢绕组上的实际电压,从而限制起动电流。
他励直流电动机起动时,为什么一定要先把励磁电流加上?若忘了先合励磁绕组的电源开关就把电枢电源接通,这时会产生什么现象(试从T=0和T=T两种情况加以分析)?当电动机运行在额定转速下,若突然将励磁组断开,此时又将出现什么情况?
为什么先加励磁电流?
没有励磁电机无法启动,会烧坏电枢
运行时励磁断开?
根据公式$n = \frac{E}{C_e\Phi}$
如果负载较重,转速可能下降,导致电流加大,烧毁电枢
如果转速不变,导致感应电动势下降,电流加大,烧毁电枢
如果负载较轻,转速上升,导致飞车
直流串励电动机能否空载运行?为什么?
不能。会飞车(参见上一题)
直流电动机用电枢回路串电阻的方法起动时,为什么要逐级切除起动电阻?若起动电阻留在电枢电路中,对电动机运行有什么影响?若切除太快、会带来什么后果?
逐级移除电阻:随着转速上升,反电动势增大,电流减小。为了维持输出转矩,需要保持电流。
电阻留在电路中?转速上升,电流下降,输出转矩下降,导致动力不足。并且电阻耗电,降低效率
切除太快?电枢电流过大,冲击电网和电机
他励直流电动机有哪些方法进行调速?其特点是什么?
| 调速方法 | 调节电枢电压 | 电枢串电阻 | 减弱磁通 |
|---|---|---|---|
| 实现 | 改变电源电压U | 在电枢回路串电阻R | 增大励磁回路电阻,减小励磁电流If |
| 调速方向 | 低于额定转速(向下调) | 低于额定转速(向下调) | 高于额定转速(向上调) |
| 特性 | 无级调速,硬度不变,效率高 | 有级调速,特性变软,效率低 | 无级调速,硬度不变,调速范围有限 |
直流电动机的电动与制动两种运行状态的根本区别是什么?
根本区别在于电磁转矩$T$与转速$n$的方向关系
电动状态: $T$与$n$的方向相同,电磁转矩是驱动转矩
制动状态: 方向相反,是制动转矩,电机吸收机械能
实现倒拉反转反接制动和回馈制动的条件各是什么?
倒拉反转制动:
- 电机接正向电源。
-
电枢回路串入大电阻。
-
被位能性负载拖着反转(n为负)或正向超速(n > n0),稳定运行于第IV象限。
回馈制动:
- 电机端电压保持接通。
-
电枢回路无大电阻(工作在固有特性附近)。
-
在外部动力(如下坡、降压调速)驱动下,电机的实际转速 n 高于其理想空载转速 n0(n > n0)。
三相异步电动机
三相异步电动机的数学描述
转差率
- 称同步转速$n_0$与转子转速$n$之差为转差
转差与同步转速之比为转差率,用$s$表示
$$s = \frac{n_0 – n}{n_0} * 100\%$$
一般情况下,空载转差率小于 0.5% ,满载转差率小于 5%
同步转速
$$n_0 = \frac{60f_1}{p}$$
其中,
- $f_1$ 为交流电流频率
$p$ 为极对数
转差频率
$$f_2 = sf_1$$
其中,
- $f_2$ 为转差频率
一台$50Hz$的三相异步电动机,$n_N = 730rpm$,空载转差率为$s_0 = 0.267\%$。
求: 极对数、同步转速、实际空载转速、额定负载时的转差率和转差频率
- 极对数:
$n = 60f_1/p$,最接近730rpm的是 p = 4 - 同步转速: 易得750rpm
- 实际空载转速:
$n^\prime _0 = n_0 (1 – s_0) = 748rpm$ - 额定负载转差率/转差频率:
$s_N = (n_0 – n_N)/n_0 = 2.67\%$
$f_2 = s_Nf_1 = 1.335Hz$
T型等值电路
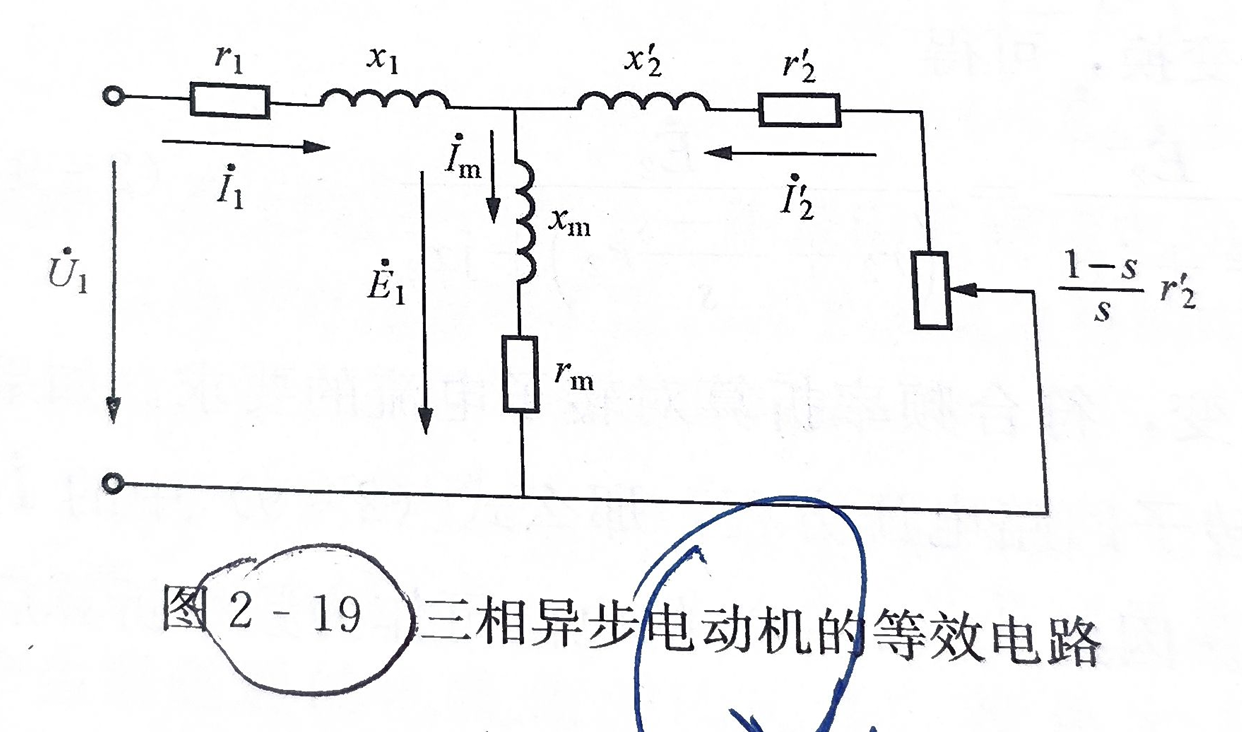
其中,
– $r_1,x_1$为定子绕组的电阻和漏电抗
– $r_2,x_2$为转子绕组的电阻和漏电抗
– $r_m,x_m$为励磁绕组的电阻和漏电抗
三相异步电动机的机械特性
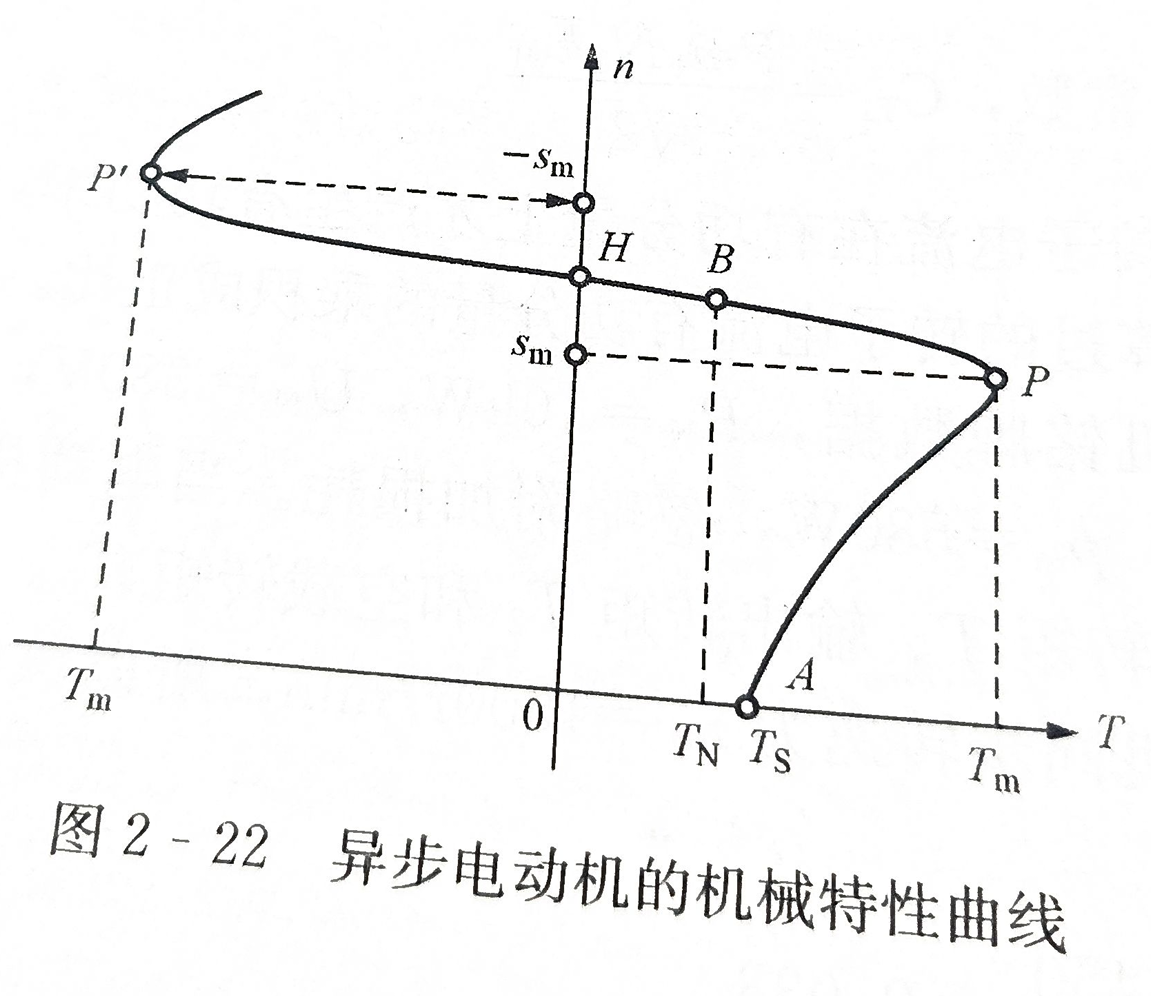
如图所示:
- $s_m$ 为最大转差率
存在
| 点位 | 转矩 | 转速 | 转差率 |
|---|---|---|---|
| 空载H | 0 | $n_0$ | 0 |
| 额定B | $T_N$ | $n_N$ | $s_n = \frac{n_0 – n_N}{n_0}$ |
| 临界点P | $T_M = k_mT_N$ | $s_m = s_n(k_m\pm (\sqrt{k_m^2 – 1}))$ | |
| 起动点A | $T_S = \frac{2T_M}{\frac{1}{s_m}+\frac{s_m}{1} }$ | 0 | 1 |
| 一般点 | $T = \frac{2T_M}{\frac{s}{s_m}+\frac{s_m}{s} }$ |
电机过载倍数:$k_m = \frac{T_M}{T_N}$
人为机械特性
人为改变电动机的机械参数可以得到不同的机械特性
对于改变电阻的行为,可以得到不同的转差之比
$$\frac{s_1}{s_2} = \frac{s_m}{s_m^\prime} = \frac{R_2^\prime}{R_2^\prime + R_\Omega ^\prime}$$
做题
某绕线转子异步电动机参数如下:
$P_N = 75kW,I_{1N}=144A ,U_{1N}=380V,E_{2N}=399V,I_{2N}=166A,n_N=1460rpm,k_m = 2.8$问题1:负载转矩为$T_z=0.8T_N$,要求转速$n_B=500rpm$时,转子每相串入多少电阻?
对于串入的电阻,有公式
$$\frac{s_1}{s_2} = \frac{s_m}{s_m^\prime} = \frac{R_2^\prime}{R_2^\prime + R_\Omega ^\prime}$$
现在缺少两个转差率以及转子电阻
有公式
$$s_m = s_n(k_m\pm (\sqrt{k_m^2 – 1}))$$
$$s_m^\prime = s_n^\prime(\frac{T_M}{T}\pm (\sqrt{\frac{T_M}{T}^2 – 1}))$$
$$R_2^\prime = \frac{S_NE_{2N}}{\sqrt{3}I_{2N}}$$